
Taajuusmuuttajia sanotaan tehoelektroniikkalaitteiksi, joilla säädetään oikosulkumoottorin nopeutta portaattomasti moottorin syöttöjännitteen taajuutta muuttamalla (=taajuusmuuttaja). Vaihtovirta sähkömoottoreiden (oikosulkumoottoreiden) pyörimisnopeutta ei voi tehokkaasti ja tarkasti säätää ilman taajuusmuuttajaa.
Sähkömoottoreiden pyörimisnopeutta on perinteisesti muutettu moottorin napaparilukua tai jättämää (liukurengasmoottorit) muuttamalla, sekä erilaisten mekaanisten vaihteistojen ja jarrujen avulla. Taajuusmuuttajia käytetäänkin pääsääntöisesti sähkömoottoreiden pyörimisnopeuden säätämiseen. Taajuusmuuttajilla mahdollistetaan moottorien käyttö erilaisissa tuotanto- ja prosessiautomaatiojärjestelmissä.
Taajuusmuuttajan etuina on, että oikosulkumoottorin pyörimisnopeutta säädetään taajuusmuuttajan prosessin mukaan, jolloin saavutetaan huomattava energiasäästö. Tällä tekniikalla pystytään vähentämään sähköverkon kuormitusta ja työkoneiden mekaanista rasitusta moottoria käynnistäessä (pienemmät käynnistysvirrat).
Tyypillisiä taajuusmuuttajien käyttökohteita ovat pumput ja puhaltimet. Muita käyttötarkoituskohteita ovat mm. hissit, paperikoneet, vinssit, kompressorit, ilmastointilaitteet, kuljettimet, kelaimet ja nosturit.
Taajuusmuuttajien käyttötarkoitukset ovat parantuneet huomattavasti uuden teknologian ja uusien sovellusohjelmien myötä. Uusien ohjelmistojen avulla voidaan taajuusmuuttaja suunnitella asiakkaalle komponenttikoostumusta muuttamatta. Taajuusmuuttajien nopea kehitys on ollut luotettavaa. Taajuusmuuttajilla voidaan luoda nykypäivänä sama tai vielä parempi suorituskyky ja luotettavuus kuin muilla perinteisillä prosessilaitteilla.
Taajuusmuuttaja soveltuu hyvin teollisuusautomaation, koneiden- ja laitteiden komponenteiksi, koska taajuusmuuttaja voidaan yhdistää osaksi automaatiojärjestelmää. Taajuusmuuttajan yhdistämisellä saadaan yksinkertaistettua prosessien säätöä ja ohjausta.

1.2 Suuntaajissa käytetyt tehopuolijohdekomponentit
Taajuusmuuttajien päävirtapiirit toteutetaan puolijohdekytkimillä. Nimensä mukaisesti niitä käytetään kytkemään kuorma toistuvassa sekvenssissä haluttuun jännitetasoon tai vaihejännitteeseen. Mekaanisin kytkimiin verrattuna niiden kytkentänopeudet ja tarkkuudet ovat aivan omaa luokkaansa. Parhaat kytkimet yltävät usean kymmenen kHz:n kytkentätaajuuteen eli kymmeniin tuhansiin kytkentöihin sekunnissa.
Nykyisin yleisimmin moottorikäyttöjen syöttölaiteissa käytettyjä tehopuolijohdekomponentteja ovat diodi, tyristori, IGBT-transistori (Insulated Gate Bipolar Transistor) sekä GTO-tyristori (Gate Turn-Off), joiden piirrosmerkit on esitetty kuvassa 3. Diodi on komponentti, jota käytetään yleisesti ohjaamattomissa tasasuuntauskytkennöissä. Se päästää viran kulkemaan virtapiirissä vain toiseen suuntaan, anodilta (A) katodille (K). Tyristoria, joka keksittiin jo vuonna 1957, voidaan pitää eräänlaisena diodin ohjattavana versiona. Jos virta pyrkii kulkemaan virtapiirin sijoitetun tyristorin anodilta katodille, virtatie avautuu annettaessa komponentin hilan (G) kautta katodille positiivinen ohjausvirtapulssi. Komponentti menee jälleen johtamattomaan tilaan, kun virta komponentin läpi pyrkii kääntymään.

Kuva 3. Yleisimmin moottorikäytöissä käytettyjen tehopuolijohteiden piirrosmerkit. a) diodi, b) tyristori, c) GTO-tyristori, d) IGBT-transistori.
Joitakin erittäin suuritehoisia sovellutuksia lukuun ottamatta diodeja ja tyristoreja käytetään nykyisin yleisesti vain suoraan syöttöverkkoon liitetyissä tasasuuntauskytkennöissä ns. verkkokommutoiduissa tasasuuntaussilloissa. Parhaimmillaan näillä komponenteilla voidaan kytkeä tuhansien ampeerien virtoja piireissä, joiden jännitteet niin ikään yltävät useisiin tuhansiin voltteihin. Kytkettävät tehot voivat siten olla MW:ien luokkaa.
IGBT –transistori on kehitetty yhdistämään bipolaaritransistorin ja MOS –fetin parhaat ominaisuudet. Näin on saatu ohjattava komponentti, jonka tarvitsema ohjausteho on pieni, kytkentänopeus suuri (n. 20kHz) ja joka soveltuu satojen kilowattien tehoisiin, tehoelektroniikalla toteutettuihin suuntaajalaitteisiin. Komponentti eroaa tyristorista siinä, että sen virran kulku kollektorilta (C) emitterille (E) voidaan katkaista halutulla hetkellä muuttamalla ohjausjännite hilan (G) ja emitterin välillä nollaksi tai negatiiviseksi. Lisäksi IGBT on tyristoria huomattavasti nopeampi komponentti, mutta häviää tälle kuitenkin tarkasteltaessa kytkettäviä maksimitehoja. IGBT:t ovatkin 90-luvulla lähes syrjäyttäneet keskitehoisissa vaihtosuuntaajissa muut puolijohdekomponentit.
GTO –tyristori on IGBT:n tapaan hilan kautta täysin ohjattu komponentti. Sen vaatima ohjausteho on kuitenkin huomattavasti suurempi ja kytkentänopeus paljon pienempi (n. 1 kHz) kuin IGBT:llä. GTO:lla kytkettävät tehot voivat sen sijaan nousta useisiin MW:hin. Sitä käytetäänkin tätä nykyään yleisesti erittäin suuritehoisissa vaihtosuuntaajissa. Tehopuolijohteiden nopean toiminnan ansiosta niillä pystytäänkin tekemään minkä muotoista jännitettä tahansa. Kuvassa 4 on vielä esitetty eri tehopuolijohdekomponenteilla saavutettavat kytkentänopeudet ja tehoalueet.
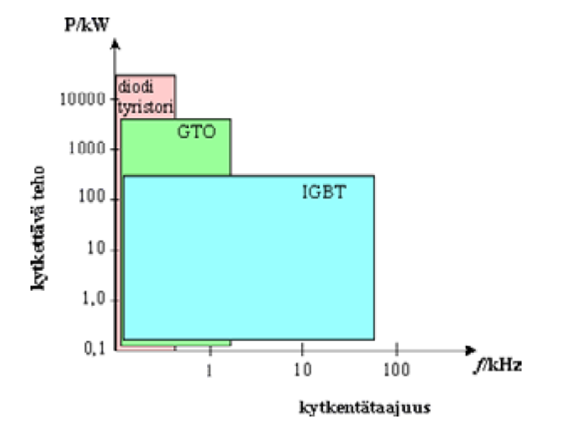
Kuva 4. Tehokomponenttien ominaisuuksia.
2 Vaihtovirtamoottorikäyttöjen jännitevälipiirilliset taajuusmuuttajat
Useat käytössä olevat taajuusmuuttajat ovat jännitevälipiirillisiä taajuusmuuttajia, eli VSI (Voltage Source Inverter ). Muita taajuusmuuttajatyyppejä ovat virtavälipiirilliset taajuusmuuttajat, eli LCI (Load Commutated Inverter), sekä syklokonvertterit.
Jännitevälipiirillisillä taajuusmuuttajilla ohjataan usein suhteellisen pienitehoisia moottoreita. Jännitevälipiirillisestä taajuusmuuttajasta on kuitenkin tehty sovellutus, jolla voidaan ohjata myös erittäin suuria, jopa 30 megawatin moottoreita. Usein jännitevälipiirillisellä taajuusmuuttajalla ohjataan oikosulkumoottoreita.
Jännitevälipiirillisessä taajuusmuuttaja koostuu kolmivaiheisesta dioditasasuuntaussillasta (6-aaltotasasuuntaus), jonka välipiiriin syöttämän tasajännitteen keskiarvo on vakio, välipiirin suodinkondensaattorista sekä pieni- ja keskitehoisissa laitteissa tavallisesti IGBT –komponenteilla toteutetusta kolmivaiheisesta vaihtosuuntaussillasta (kuva 5). Vaihtosuuntaussillan diodit mahdollistavat induktiivisen kuormavirran kulun kaikissa kytkentätilanteissa. Välipiiriin tai verkon puolelle sijoitetuilla kuristimilla pyritään parantamaan verkkovirran käyrämuotoa. Välipiiriin sijoitetussa ylimääräisessä vastushaarassa kulutetaan moottorin sähköisen jarrutuksen yhteydessä välipiiriin palaava jarrutusenergia.
Tasasuuntaajassa (verkkokonvertteri) kolmivaiheinen vaihtojännite muutetaan tasajännitteeksi esimerkiksi tyristoreiden avulla. Tyristorit liipaistaan vuorotellen johtaviksi aina silloin, kun niihin tulevan vaiheen jännitteen suuruus on suurimmillaan. Tämä jännite johdetaan taajuusmuuttajan positiiviseen kiskoon. Negatiivinen jännite saadaan aikaan, kun miinuskiskoon yhteydessä olevat tyristorit liipaistaan johtaviksi aina, kun niihin tulevan kolmivaiheisen jännitteen suuruus on pienimmillään.
Taajuusmuuttajan jännitevälipiirissä on kela sekä kondensaattori. Jännitevälipiirin tehtävänä on suodattaa tasajännitteestä pois mahdolliset tasajännitteen epäpuhtaudet, välipiiri toimii myös energiavarastona. Välipiiristä voidaan ottaa taajuusmuuttajan ohjauselektroniikan tarvitsema käyttöjännite.
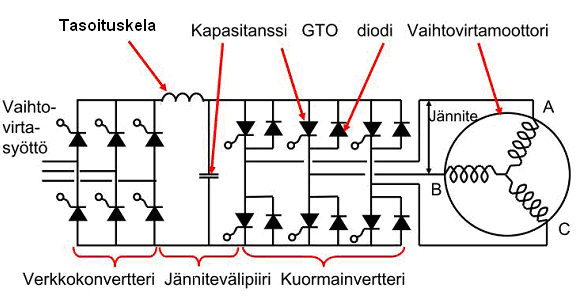
Kuva 5. Jännitevälipiirillinen PWM-taajuusmuuttaja, vaihtosuuntaus GTO-tyristoreilla.
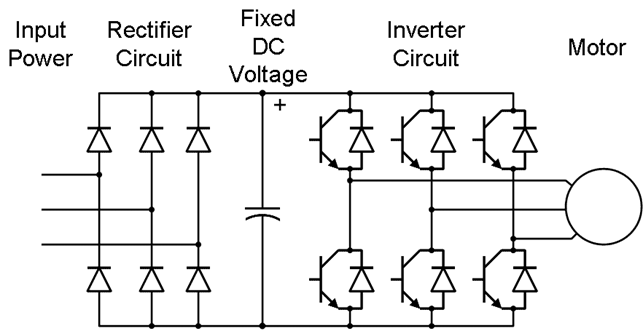
Kuva 6. Jännitevälipiirillinen PWM-taajuusmuuttaja, vaihtosuuntaus IGBT-transistoreilla.
Kun oikosulkumoottorin toimintaa tarkastellaan stationäärisessä toimintapisteessä, havaitaan sen kehittämän momentin olevan verrannollinen syöttöjännitteeseen (tai oikeammin sen neliöön), joka taas määrää koneen ilmavälivuon suuruuden, sekä koneen jättämään, joka riippuu koneen syöttötaajuutta vastaavan kulmanopeuden ja roottorin todellisen nopeuden erosta. Oikosulkumoottorin jättämään ja edelleen koneen kehittämään momenttiin voidaan siten vaikuttaa suoraan koneen syöttöjännitteen taajuutta muuttamalla. Kun jättämä on positiivinen, kone toimii moottorina ja sähköteho siirtyy syöttöverkosta taajuudenmuuttajan kautta sähkökoneelle ja edelleen sen akselin välityksellä mekaaniseksi energiaksi prosessiin. Kun jättämä ohjataan negatiiviseksi eli moottorin jännitteiden syöttötaajuutta pienennetään alle roottorin pyörimisnopeutta vastaavan taajuuden, muuttuu koneen kehittämä momentti negatiiviseksi ja siirrytään sähköiseen jarrutukseen. Tällöin jarrutusenergia siirtyy koneen ja vaihtosuuntausillan kautta välipiiriin. Koska diodisiltaa ei voida ohjata tyristorisillan tapaan, ei sen läpi voida myöskään palauttaa jarrutusenergiaa syöttöverkkoon, vaan se on kulutettava välipiirin jarruvastuksessa.
Jotta oikosulkumoottoria voidaan hyödyntää maksimaalisesti, pyritään sen ilmavälivuo pitämään koko ajan lähellä optimaalista maksimiarvoa. Koska ilmavälivuon derivaatta on likipitäen verrannollinen koneen napajännitteeseen, täytyy sinimuotoisilla suureilla jännitteen ja syöttötaajuuden suhde pitää vakiona, kun vuon huippuarvon halutaan pysyvän muuttumattomana. Siksi taajuudenmuuttajan vaihtosuuntausosan on pystyttävä tuottamaan halutun taajuiset vaihejännitteet ja kyettävä samanaikaisesti vaikuttamaan myös jännitteiden tehollisarvoihin.
Taajuudenmuuttajan vaihtosuuntaussillassa halutun taajuisten ja suuruisten vaihejännitteiden muodostamiseen käytetään ns. pulssileveysmodulointitekniikkaa (PWM, Pulse Width Modulation) kuvan 7 mukaisesti. Siinä kukin vaihejännitelähtö kytketään vaiheen tehopuolijohdekytkimien (IGBT-transistorit tai GTO-tyristorit) avulla suurella kytkentätaajuudella (1-20 kHz) vuorotellen tasajännitevälipiirin positiiviseen ja negatiiviseen kiskoon. Moduloinnissa kytkimien keskinäisiä johtoaikoja muutetaan koko ajan siten, että tuloksena syntyy keskimääräisesti oikean suuruinen pienempi taajuinen sinimuotoinen vaihtojännite.
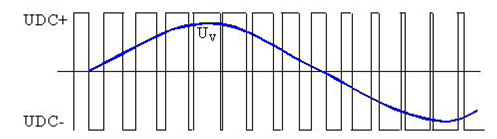
Kuva 7. Sinimuotoisen jännitteen tuottaminen PWM-tekniikalla
3 Taajuusmuuttajan ohjaus
Varsinaisen moottorikäytön säädön lisäksi säätöjärjestelmän prosessorin tai prosessorien on yleensä huolehdittava myös mahdollisesta ohjattavan verkkosillan tarvitsemasta säädöstä sekä osasta tai kaikista ohjattavan prosessin säädöistä. Säätöjen ja tarvittavien suojauksien toteuttaminen vaatii monia reaaliaikaisia mittauksia prosessin, moottorin, suuntaajan ja syöttävän verkon puolelta (kuva 8). Mittaukset on yleensä optosähköisesti erotettu säätöjärjestelmästä. Näiden lisäksi nykyaikaisten moottorikäyttöjen säätöjärjestelmät sisältävät säädön tarvitsemien moottoriparametrien identifioinnin, säätöjärjestelmän automaattisen viritysmahdollisuuden sekä moottorin reaaliaikaisen dynaamisen mallin, jonka avulla tarvittavien ulkoisten takaisinkytkentöjen määrää voidaan vähentää. Käytön säätöjärjestelmä on usein yhdistetty tiedonsiirtoväylällä laajempaan kokonaisuuteen.
Usein jännitevälipiirillisien taajuusmuuttajien ohjaus perustuu joko skalaarisäätöön, skalaarivektorisäätöön tai suoraan momenttisäätöön.
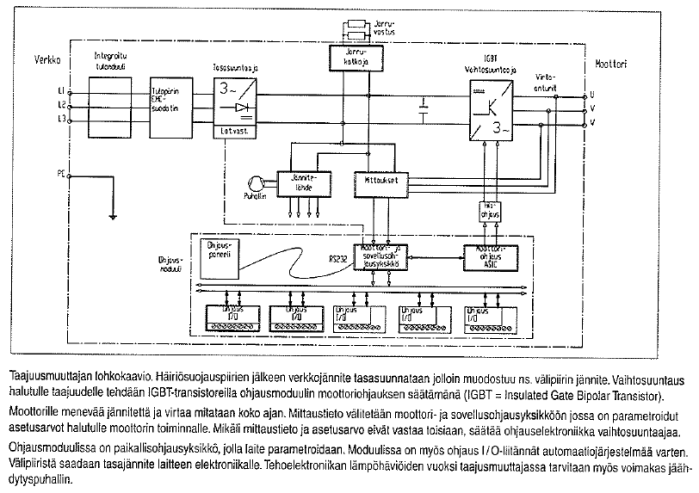
Kuva 8. Taajuusmuuttajan toimintakaavio.
4 Taajuusmuuttajan käyttö
4.1 Taajuusmuuttajan ohjaus
Käyttökohteesta riippuen käytetään joko yksi- tai kolmivaiheista taajuusmuuttajaa.
Logiikkaohjelmoijan on selvitettävä sähkösuunnittelijan kanssa, millä keinoin taajuusmuuttajaa ohjataan:
- paikallisesti taajuusmuuttajan käyttöpaneelin kautta
- I/O: kautta
- jännitesignaalilla (kosketintiedoila) DIN-tuloliittimiin
- jännite ohjauksiin saadaan taajuusmuuttajan välipiiristä (24VDC)
- analogiaviesteillä
- jänniteviesti 0-10VDC
- virtaviesti 0-20mADC tai 4-20mADC
- kenttäväylän kautta (Profibus, Profinet, yms.)
Ohjaus väylän kautta alkaa olla yleisin tapa teollisuusautomaatiossa, koska siten saadaan esimerkiksi kaikki hälytyskoodit ja muut tarvittavat tiedot taajuusmuuttajan tilasta helposti ja ilman lisäosia.
Kun ohjaustapa on selvillä, pitää vielä selvittää taajuusmuuttajan parametrointi, eli asetusten ohjelmointi.
Esimerkkinä moottorin sähkömekaanisen jarrun ohjaus:
- ohjaako taajuusmuuttaja jarrua (=> vaatii parametrointia) vai
- ohjaako jarrua jokin logiikan lähdöistä?
Parametrointi tehdään joko taajuusmuuttajan etupaneelin kautta tai tietokoneen avulla (sarjakaapelin tai kenttäväylän avulla). Valmistajasta riippuen taajuusmuuttajissa on joitain oletusparametrejä valmiina.
Parametrointi tehdään käyttökohteen edellyttämien vaatimusten mukaisesti. Ensin taajuusmuuttaja on tehtävä yhteensopivaksi moottorin kanssa, jolloin tärkeimmät taajuusmuuttajan moottoriparametrit ovat moottorin nimellisvirta, boost- tai IR-67 kompensointi, jättämä, napapariluku, PWM-taajuus, moottorijännite ja vaihesiirtokulma.
Taajuusmuuttajan ohjausparametreista tärkeimpiä ovat muun muassa nopeusohje asetuk-set, rampit (kiihdytys- ja jarrutusajat), 4-kvadranttiasetus, resetointiasetus, sekä minimi- ja maksimitaajuudet.
4.2 Taajuusmuuttajan jarrutustarve
Kun halutaan nopeita hidastuksia taajuusmuuttajan ohjaamalle epätahtimoottorille, muuttuu moottori helposti generaattoriksi. Moottorin synnyttämä teho virtaa tällöin taajuusmuuttajan välipiiriin aiheuttaen välipiirin jännitteen nousua, jota puolestaan taajuus-muuttajan jännitesäätäjä yrittää kompensoida nostamalla lähtötaajuutta.
Koko käytön hidastuvuus riippuu tällöin itse käytön ja moottorin häviöistä sekä siitä, paljonko taajuusmuuttaja pystyy kuluttamaan moottorin tuottamaa jarrutusenergiaa.
Vakiorakenteinen taajuusmuuttaja pystyy jarruttamaan moottoria vain näiden häviöiden suuruisella (n. 20% nimellistehosta) teholla.
Kun moottoria on voitava jarruttaa suuremmalla teholla kuin mitä häviöt ovat, jotta haluttu hidastuvuus saavutettaisiin, on käytettävä vastusjarrutusta, joka koostuu ns. jarrukatkojasta ja jarruvastuksesta. Jarruvastuksessa ylimääräinen jarrutusenergia muuttuu lämmöksi.
Lisäjarrutusta vaativa käyttöjä ovat mm. lingot, nosturit, eräät kuljettimet ja erittäin nopeita suunnanvaihtoja vaativat käytöt.
4.2.1 Jarrukomponentit
Jarrukatkoja on yleensä taajuusmuuttajaan tehtaalla valmistuksen yhteydessä asennettava lisälaite (kuva 9). Se ohjaa välipiiriin jarrutuksessa generoidun energian jarruvastukseen. Jarrukatkojan kytkinkomponentteina käytetään nopeita ja kestäviä tehopuolijohteita.
Jarruvastus on taajuusmuuttajan ulkopuolelle asennettava pieni-impedanssinen tehovastus. Oikean jarrutustehon ja tehonkeston saavuttamiseksi jarruvastuksia voidaan kytkeä rinnan ja/tai sarjaan kuitenkin niin, että ei taulukoituja nimellisvastusarvoja aliteta.

Kuva 9. Jarrukomponentit ja periaatteellinen kytkentä.
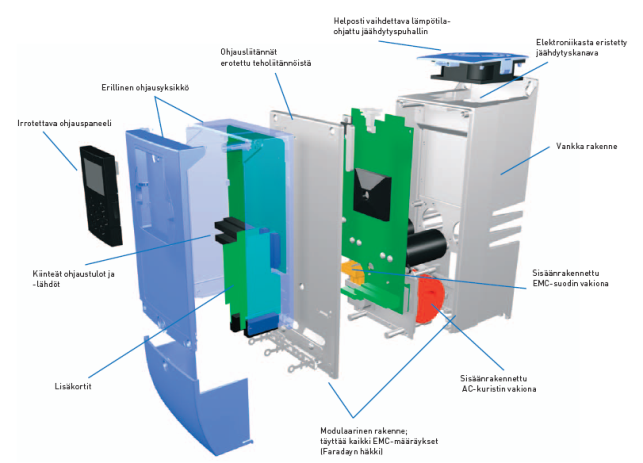
Kuva 10. Taajuusmuuttajan sisäinen kytkentä.
5 Taajuusmuuttajan lisälaitteet
Taajuusmuuttajaan on saatavilla valmistajasta ja mallista riippuen vaihteleva määrä irrallisia lisälaitteita (kuva 11):
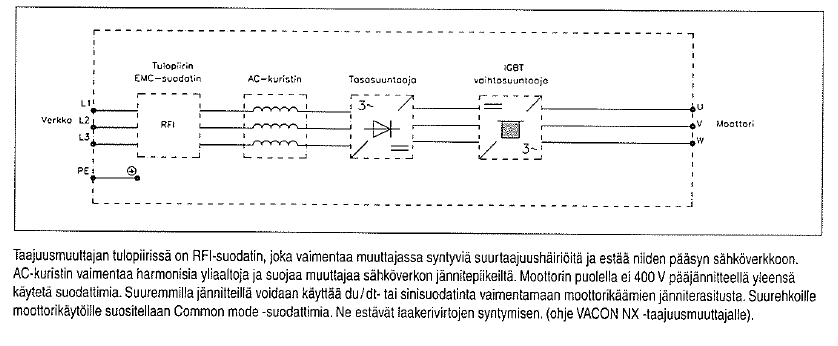
- EMC-suodatin (verkkosuodatin, RFI-suodatin)
- EMC-suodattimella vaimennetaan taajuusmuuttajasta sähköverkkoon emittoituvia häiriöitä
- suodatin voi olla myös sisäänrakennettuna.
- Verkkokuristin (AC-kuristin, estokelat)
- verkkokuristimet parantavat taajuusmuuttajan ylijännitesuojausta
- tärkeä ominaisuus teollisuuden ”likaisissa” sähköverkoissa, varsinkin kun taajuusmuuttajat sijaitsevat lähellä syöttävän sähköverkon muuntajaa
- verkkokuristin voi olla myös sisäänrakennettuna.
- Lähtökuristimet
- vaimentavat suojaamattomasta moottorikaapelista tulevia häiriöitä
- kun asennus tehdään EMC-kelpoisella tavalla, pysytään moottorin puolella standardin EN 55011 mukaisen raja-arvoluokan B sisällä
- EMC-kelpoisen asennuksen osalta lähtökuristin toimii tällöin suojatun moottorikaapelin vaihtoehtona.
- Lähtösuodatin
- lähtösuodattimet ovat taajuusmuuttajien lähtöjännitteen tasaukseen tarkoitettuja siniaaltosuodattimia
- lähtösuodattimia käytetään ryhmäkäytöissä vaimentamaan moottorikaapeleissa kulkevia tasausvirtoja ja ehkäisemään pitkissä moottorikaapeleissa esiintyviä jännitepiikkejä.
- Jarruvastukset
- kun moottoria on voitava jarruttaa suuremmalla teholla kuin mitä häviöt ovat, jotta haluttu hidastuvuus saavutettaisiin, on käytettävä vastusjarrutusta, joka koostuu ns. jarrukatkojasta ja jarruvastuksesta
- jarruvastuksessa ylimääräinen jarrutusenergia muuttuu lämmöksi
- jarruvastus on taajuusmuuttajan ulkopuolelle asennettava pieni-impedanssinen tehovastus.
- Laajennus/moduulikortit
- kenttäväylä
- lähiverkko
- anturiliityntäkortit (pulssianturi, asemointiraja)
- ohjelmointikortti (sirukortti)
- muistin laajennuskortti

Kuva 11. Taajuusmuuttajan ohjausratkaisut ja lisälaitteet.
6 EMC-häiriöt taajuusmuuttajakäytöissä
6.1 Yleistä
(EMC, electromagnetic compatibility).
Ilmaisu ”sähkömagneettinen häiriö” viittaa siihen, että jossakin teknisessä ympäristössä sähkövaraukset vaikuttavat toisiinsa toisella tavalla kuin laitteen tai järjestelmän suunnittelijat ovat tarkoittaneet. Häiriölähteet jaotellaan yleensä luonnollisiin ja teknisiin häiriöihin. Pääpiirteittäin jako voidaan tehdä esimerkiksi seuraavasti:
6.1 Luonnolliset häiriöt
– Salamaniskun aikana pilven varauksen purkautumisesta syntyvän sähkövirran aiheuttama nopeasti muuttuva magneettikenttä.
– Auringon ja muiden kosmisten lähteiden säteilyn aiheuttama taustakohina.
6.2 Tekniset häiriöt
– Staattisen sähkön purkaukset.
– Digitaalisten pulssien lyhyiden nousu- ja laskuaikojen aiheuttamat nopeat sähkö- ja magneettikenttien muutokset.
– Sähköverkossa kuormien kytkemisten yhteydessä tapahtuvat jännitteen muutokset.
– Langattoman viestinnän voimakkaan lisääntymisen myötä myös häiriöitä esiintyy entistä enemmän, mikä korostuu erityisesti ns. vapailla taajuuksilla.
Kokemusperäisesti tiedetään sähkömagneettisia häiriöitä tyypillisesti esiintyvän siellä, missä esiintyy suuria virtoja ja jännitteitä, tai missä virta poikkeaa sinimuotoisesta. Sähkömagneettiset häiriöt voivat häiritä tai vahingoittaa tietoteknisiä järjestelmiä ja laitteita sekä elektronisia komponentteja tai piirejä sisältäviä laitteita (kuva 12).
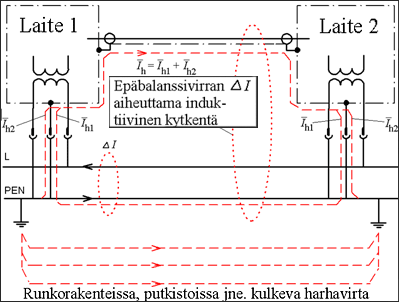
Kuva 12. Häiriöiden kytkeytyminen.
6.3 Potentiaalisia sähkömagneettisten häiriöiden lähteitä ovat esimerkiksi:
– induktiivisten kuormien kytkinlaitteet
– sähkömoottorit
– loistevalaisimet
– hitsauskoneet
– tietokoneet
– tasasuuntaajat
– hakkurilaitteet
– taajuusmuuttajat
– hissit
– muuntajat
– keskukset
– jakelukiskot
6.4 EMC-suojauksen toteutus
Uusitun SFS 6000-standardisarjan mukaan TN-S-järjestelmä on perusedellytys toimivalle häiriösuojaukselle (kuva 13). Kyseisen luvun muissa kohdissa annetaan lisäohjeita (esimerkiksi potentiaalintasaus, maadoitukset, reitit, etäisyys häiriölähteistä, komponenttivalinnat ja tarvittavat erityistoimenpiteet) häiriösuojauksen parantamiseksi.
Sähkösuunnitelmassa määritellään menettelyt, joilla kyseisen kohteen EMC-suojaus toteutetaan. Käytetyt ratkaisut kirjataan käyttöönottotarkastuspöytäkirjaan, jonka laitteiston haltija on velvollinen säilyttämään niin kauan kuin laitteisto on käytössä.
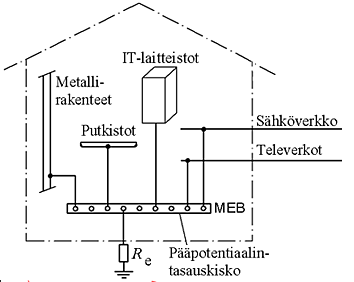
Kuva 13. Maadoitusten käyttö häiriöiden estämiseen.
6.4.1 Viranomaisneuvonta ja -valvonta
Päävastuu radiohäiriöiden neuvonta-asioissa, ennaltaehkäisyssä ja ongelmatilanteiden puolueettomana selvittäjänä on Viestintävirastolla ja Tukesilla.
Viestintävirasto vastaa radio- ja telelaitteiden vaatimustenmukaisuuden valvonnasta. Muiden sähkölaitteiden osalta tästä vastaa Tukes.
6.4.2 Lisätietoa aiheesta saatavilla
Lisää käytännön tietoa sähköjärjestelmiin liittyvistä sähkömagneettisesta yhteensopivuudesta ja sähkömagneettisten häiriöiden pienentämisestä löytyy esimerkiksi Sähkötieto ry:n tänä vuonna päivittämästä ST-käsikirjasta ”EMC ja rakennusten sähkötekniikka”.
6.5 Taajuusmuuttajan aiheuttamat häiriöt
Taajuusmuuttajat ovat yleistyneet teollisuuden erilaisten käyttöjen lisäksi myös asuinrakennuksissa, josta johtuen häiriölähde on näin tullut lähemmäksi tavallisia käyttäjiä.
Taajuusmuuttajia käytetään asuinrakennuksissa mm.
- ilmastointilaitteistoissa
- pumpuissa
- lämpöpumpuissa
- hisseissä
Häiriöiden syynä ovat usein väärät laite- tai kaapelivalinnat sekä asennusvirheet. Tehdasvalmisteiset laitteistopaketit ovat yleensä OK, asennuspaikalla kootuissa laitteistoissa on esiintynyt suunnittelijoiden ja asentajien tottumattomuudesta johtuvia virheitä. Taajuusmuuttajan ja moottorin välinen kaapeli on häiriöiden kannalta kriittinen (kuva 14).
Muita kriittisiä kohteita:
- verkkosuodatin
- verkkokuristin (AC-kuristin)
- verkkosuodatin (EMC/RFI suodatin)
- maadoitukset
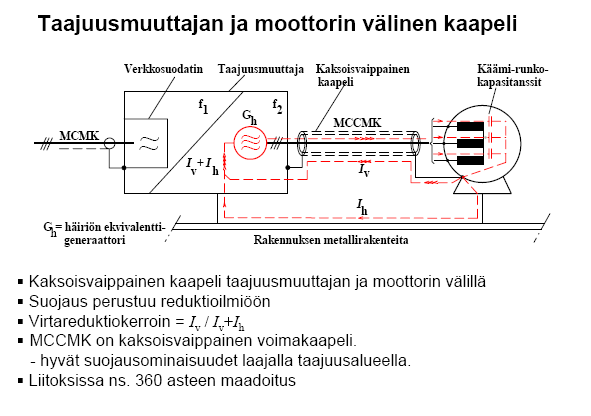
Kuva 14. Taajuusmuuttajan kaapeloinnin häiriösuojaus.
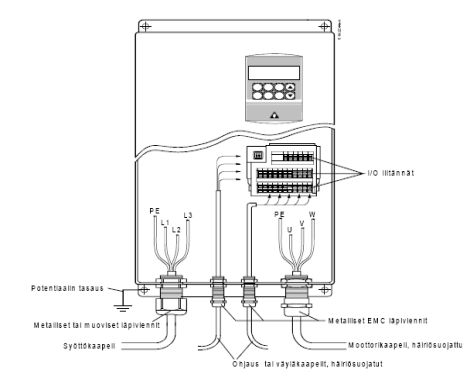
Kuva 15. Taajuusmuuttajan kaapeleiden läpiviennit.
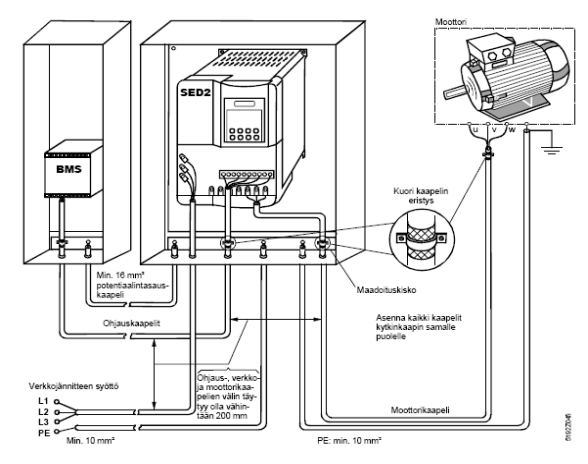
Kuva 16. Taajuusmuuttajan kaapeloinnit.
8 MUISTILISTA TAAJUUSMUUTTAJA-ASENNUKSISTA
- Tarkista taajuusmuuttajan vaatimuksenmukaisuusvakuutuksen olemassaolo ja sisältö.
- Tarkista taajuusmuuttajan soveltuvuus käyttöympäristöönsä.
- Tarkista, että sijoitus ja kaapelointien EMC- suojaukset on suoritettu valmistajan ohjeiden mukaan – joidenkin valmistajien ohjeet voivat olla varsin puutteellisia.
- Taajuusmuuttajien sijoitus toisiinsa nähden (turvaetäisyydet).
- RFI-suotimen käyttö (sisäänrakennettu/erillinen).
- AC-kuristimen käyttö (sisäänrakennettu/erillinen).
- Asennuksen/koteloinnin EMC-suojaus, jos taajuusmuuttaja on sijoitettu esim. keskuksen sisälle.
- Taajuusmuuttajien lisäjäähdytys ilmastoinnilla yms. keskuksen sisälle asennettaessa.
- Kaapelointien ohjeen mukaisuus
- tiedonsiirto- ja voimakaapeleiden erilleen asennus
- oikeat kaapelityypit, sekä moottori- että tiedonsiirtokaapeleissa
- oikeat kytkennät
- Tarkista kaikki maadoitukset.
- Moottorikaapelin vaipan 360 asteen maadoituksen toteutuksen asianmukaisuus
- erittäin useasti vaipan maadoitus on suoritettu puutteellisesti tai suorittamatta suurtaajuisia häiriöitä vastaan kokonaan.
- Turvakytkimen EMC-kelpoisuus (turvakytkin+läpivientiholkit).
- erittäin usein on käytetty tavallista turvakytkintä
- Asennusten käyttöönottotarkastus tarvittavine mittauksineen.
- Käyttötestit ja dokumentointi.
- Käyttöopastus ja koulutus asiakkaalle.
Edellä mainitut tarkistukset edellyttävät ehdottomasti, että taajuusmuuttajan manuaali ja sähkösuunnitelmat ovat käytettävissä.
- Taajuusmuuttajien tulevaisuuden näkymät
Sähkökoneita kehitettäessä on eräinä merkittävinä tavoitteina ollut toisaalta niiden painon pienentäminen ja toisaalta hyötysuhteen parantuminen. Moottorin materiaalin optimointi ja jäähdytyksen tehostaminen ovat mahdollistaneet sen, että tietyn runkokoon koneesta voidaan ottaa yhä suurempia akselitehoja. Laakeriteknologian parantuessa koneen pyörimisnopeuksia on voitu edelleen nostaa merkittävästi ja samalla tietyn tehoisen koneen kokoa vastaavasti pienentää. Osa oikosulkumoottorin häviöistä johtuu siitä, että koneen tarvitsema magnetointivirta syötetään staattorikäämityksen kautta.
Kestomagneettimateriaalien kehittyessä on tullut mahdolliseksi rakentaa kestomagnetoituja keskitehoisia tahtikoneita, jotka alkavat olla kokonaistaloudellisesti kilpailukykyisiä oikosulkumoottoreiden kanssa. Kestomagneettimoottoreiden suosion voidaankin olettaa kasvavan merkittävästi lähitulevaisuudessa.
Tarvittavan asennustilan sekä toisaalta moottorikäyttöjen aiheuttamien sähköisten häiriöiden pienentämiseksi on pyrkimyksenä ollut integroida käytön moottori ja sitä syöttävä suuntaaja samaan koteloon. Viime aikoina markkinoille on ilmestynytkin pienitehoisia, alle 10 kW:n oikosulkumoottoreita, joiden staattorin päähän, samoihin kuoriin on sijoitettu taajuudenmuuttaja. Kehitys tullee jatkumaan suuremmissa teholuokissa.
EMC-direktiivin tultua voimaan on moottorikäyttöjen aiheuttamiin, sekä säteileviin että johtuviin häiriöihin ollut pakko kiinnittää yhä enemmän huomiota. Toisaalta laitteiden on direktiivin mukaisesti siedettävä tietty ulkoapäin tuleva häiriötaso. Laitteiden ja kokonaisten järjestelmien koteloinnin ja toteutuksen uudelleen suunnittelulla voidaan vaikuttaa merkittävästi säteilevien häiriöiden tasoon ja toisaalta laitteiden häiriösietokykyyn. EMC-pohjainen laitesuunnittelu ja testaus työllistääkin lähitulevaisuudessa yhä useampia suunnittelijoita.
Perinteiset diodi- ja tyristoritasasuuntaussillat aiheuttavat syöttöverkkoon pienitaajuisia, häiritseviä yliaaltoja. Lisäksi esimerkiksi tyristorisillan syöttöverkosta ottama loisteho riippuu sillan sytytyskulman arvosta. Näiden häiriöiden eliminoimiseksi on moottorikäyttöihin kehitetty hilakommutoidun vaihtosuuntaussillan tapaisia moduloituja verkkosuuntaajia, joilla pystytään palauttamaan myös moottorin jarrutusenergia takaisin syöttöverkkoon. Joillakin taajuusmuuttajien valmistajilla näitä onkin jo tuotevalikoimissaan. Myös kokonaan uusilla suuntaajaratkaisuilla on mahdollista pienentää kokonaishäiriöitä. Kehitys jatkunee näillä molemmilla osa-alueilla
Tehokomponentteja kehitetään jatkuvasti siten, että niiden jännite- ja virtakestoisuudet sekä kytkentätaajuudet kasvavat samalla, kun niiden kytkentä- ja johtotilan häviöitä pyritään pienentämään. Saavuttamattomana päämääränä on ideaalinen kytkinkomponentti, joka on häviötön ja pystyy kytkemään äärettömän nopeasti lähes äärettömän tehon. Seuraavana askeleena kohti päämäärää pidetään MCT-komponentin (Mos Controlled Thyristor) kehittämistä käytännön sovellutuksiin. Komponentin pitäisi olla tehonkäsittelykyvyltään IGBT:ä parempi ja sen johtotilan häviöt olisivat huomattavasti pienemmät. Komponentin on kaavailtu korvaavan GTO-tyristorin suuritehoisissa moottorikäytöissä.
Enemmän kuin varsinaisen suuntaajien tehoelektroniikkaan liittyvää kehitystyötä tehdään tutkimus- ja tuotekehitystyötä moottorikäyttöjen säätöjärjestelmien parissa. Kun prosessorien toimintanopeudet kasvavat, voidaan yhä tarkempia, käytön dynaamiseen malliin perustuvia säätöjärjestelmiä toteuttaa reaaliajassa. Pyrkimyksenä on parantaa vaihtovirtakäyttöjen momentinsäätöä dynaamisissa muutosilmiöissä ja samalla kasvattaa koko ohjattavan prosessin nopeutta ja tuottavuutta.
Myös säädössä tarvittavien, suuntaajan ulkopuolelta tulevien mittausten määrää pyritään pienentämään. Tavoitteena on kaikilla nopeuksilla tarkasti toimiva moottorikäyttö, joka ei vaadi esimerkiksi nopeuden takaisinkytkentää moottorin akselilta. Se edellyttää säätöjärjestelmään sisällytettyä moottorin tarkkaa mallia ja tämä taas luotettavaa menetelmää, jolla moottorin parametrit voidaan käytön aikana jatkuvasti määrittää. Myös moottorikäytön helpompaan käyttöönottoon kiinnitetään tulevaisuudessa yhä enemmän huomiota. Tämä merkitsee käytön itseviritysominaisuuksien edelleen kehittämistä ja vaikkapa kaukoviritysmahdollisuutta ja vikadiagnostiikan toteuttamista esimerkiksi televerkon välityksellä.
LÄHTEET
- Tuusa, Heikki. Sähkömoottorikäytöt. WWW-dokumentti. http://www.leenakorpinen.fi/archive/svt_opus/11sahkomoottorikaytot.pdf. Ei päivitystietoa. Luettu 7.10.2009.
- Korpinen, Leena. Sähkökoneet. http://www.leenakorpinen.fi/archive/svt_opus/10sahkokoneet_1osa.pdf. Ei päivitystietoa. Luettu 7.10.2009.
- Vacon Oy. Vacon NXL taajuusmuuttaja. WWW-dokumentti. http://www.vacon.fi/Default.aspx?id=461936. Ei päivitystietoa. Luettu 6.10.2009.
- Unidrive SP taajuusmuuttaja. WWW-dokumentti. http://www.sks.fi/inet/sks/contman.nsf/0/28433E62132FE169C225730E003747BA/$file/Unidrive%20SP%20esite%20suomi.pdf. Ei päivitystietoa. Luettu 7.10.2009.
- Siemens SED-2 taajuusmuutaja. WWW-dokumentti. http://www.eco-paronen.fi/uploads/files/SED-2_Manuaali.pdf. Ei päivitystietoa. Luettu 7.10.2009.